Abstract
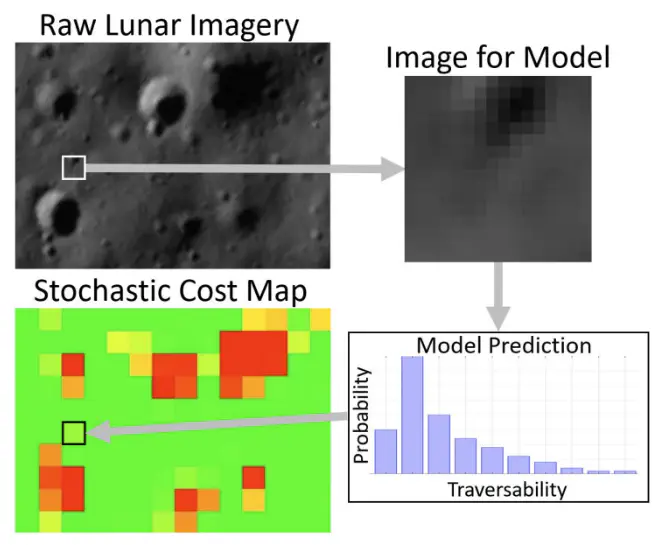
Accurate global path planning is critical to the success of lunar rover missions, yet current approaches are fundamentally constrained by uncertainty in remote sensing data. Orbital imagery provides only partial and low-resolution information about surface hazards, rendering deterministic planning strategies brittle to unexpected terrain conditions. To address this challenge, we propose a method for generating probabilistic terrain models suitable for stochastic optimization. A convolutional neural network classifier is trained on lunar imagery to predict traversability distributions across surface regions, enabling the construction of uncertainty-aware cost maps. Testing shows that the model performs well, significantly surpassing traditional image processing techniques and human performance at the classification task. To better capture realistic terrain variability, spatial correlations between adjacent regions are incorporated into the sampling process. These uncertainty-aware maps can be sampled to generate coherent terrain realizations, providing inputs to two-stage stochastic programming models for robust global path planning under uncertainty.